







Tethered Airship-Mounted Detection
- maynie2

- Sep 24, 2023
- 4 min read
Updated: Nov 8, 2023
The Background and Purpose of the Experiment
A comprehensive field experiment of air pollution in the heavy-haze area around the middle reaches of the Yangtze River, was conducted by Wuhan Rainstorm Research Institute of China Meteorological Administration, together with Nanjing University of Information Science & Technology, China University of Geosciences (Wuhan), Jiangsu Institute of Meteorological Sciences, and College of Agriculture, Yangtze University.
The field experiment helped reveal the causes and mechanisms of atmospheric aerosol changes in the middle reaches of the Yangtze River, which had important applicable value and strategic significance. Its benefits included enriching the scientific understanding of the pollution formations in different regions, improving the decision-making and response speed for the atmospheric environment, and serving the regional economy and sustainable social development. As one of the main detection devices in the experiment, Sniffer 4D multi-gas detection system had played an important role in data collection and analysis.

Xianning Experimental Base of Wuhan Rainstorm Research Institute, China Meteorological Administration
The Brief Introduction and the Progress of the Project
According to Wuhan Rainstorm Research Institute of China Meteorological Administration, the project has completed its first 20-day observation experiment on January 16, 2019. And the second round of observation experiment is currently underway, lasting from May 20, 2019, to June 10, 2019. During the experiment, the researchers conducted 8 simultaneous and encrypted detections at three observation fields individually located in Xianning, Jingzhou, and Xiangyang, Hubei province. And the researchers applied both tethered airship and drone to carry Sniffer4D, meteorological sensor, black carbon sensor and other observation devices in the experiment. This detection method overcame the severe weather, abnormalities of GPS satellite search, and unstable data collection during the flight. So that the experiment could scan the concentration profiles of SO2, NO2, CO, O3, black carbon and aerosols of different sizes, as well as acquiring the vertical profiles of wind speed, wind direction, temperature, humidity, air pressure and other meteorological elements.
The Reasons to Choose Our Sniffer4D
Wuhan Rainstorm Research Institute stated the reasons to choose Sniffer4D as the main device in the experiment:
• Small and lightweight: Sniffer4D's lightweight design (500-600g) allows it to be easily mounted on small drones and tethered airships, and it has little effect on the flying time of drones.
• 3D coordinate marking: Sniffer4D can mark the latitude & longitude (via GPS) and the relative altitude (via Barometer) for each group of monitoring data (1Hz), which will help researchers easily scan the concentration profiles of target gases and particulate matters.
• Flexible configurations: Sniffer4D can sense up to 9 gases and particulate matters at the same time. The modules can be flexibly configured according to the needs of the working scenarios, which can meet the diverse requirements of detection goals.
• Data integrity: While using wireless data transmission, Sniffer4D and the analytical software Sniffer4D Mapper support data retrieval, which allows the system to save the data during communication breakdown, and to retrieve unreceived data after the connection is re-established; meanwhile, the SD card backup module on the Sniffer4D unit can record the monitoring data at the same time. Anyway, the data retrieval and the local data backup can ensure data integrity to the greatest extent.
• Quantifiable data quality: Objectively speaking, there is a big gap in data accuracy between the sensor-based, small & low-cost monitoring device and the scientific-level monitoring equipment. However, it was not practical to apply the heavy, large and expensive detecting equipment to collect data from high altitudes in this experiment. The report "Long-term correlation monitoring comparison result" offered by Soarability, as well as Sniffer4D's "Calibration Certificate" issued by the South China National Metrology and Testing Center have provided reliable supports for quantitative data collection.

Sniffer4D's long-term (2 months in wide-range temperature and humidity) comparison report compared with a scientific grade monitoring station

The calibration certificate for Sniffer4D
How to Apply Sniffer4D
Before the experiment started, the researchers installed Sniffer4D above the propellers of the drone and inside the string bag of the tethered airship. After all the accessories and the cables are properly installed and connected, the researchers turned on Sniffer4D and started warming up(The compulsory warm-up time is 5min, and we recommend 10-20min of warm-up time to meet the data quality required by scientific projects). Once the warm-up process was finished and the indicators for GPS and SD appeared normal, the researchers operated the drone and flew the tethered airship to have a vertical scanning. It is recommended to perform vertical scanning at a rise/fall speed of 0.5~1m/s, so as to avoid the influence of rapid pressure changes on the electrochemical sensor as far as possible.

Drone-mounted Sniffer4D Multi-gas Detection System

The researchers operated the drone to collect data

The researchers adjusted the tethered airship(He)-mounted multi-gas detection system

The airship-mounted detection experiment started
During the experiment, our analytical software Sniffer4D Mapper generated the 3D point-cloud heat map, the 2D grip heat map and the 2D isoline heat map for pollution distributions in real-time to show Sniffer4D's working status, proving the real-time and intuitive data for the experiment. To prevent data loss caused by communication interruption or other factors, the researchers applied both data transmission and SD card data backup for data security.

Sniffer4D Mapper displayed the 3D point cloud heat map for O3 distributions in real-time (Detected by vertical lifting and dropping of the drone)
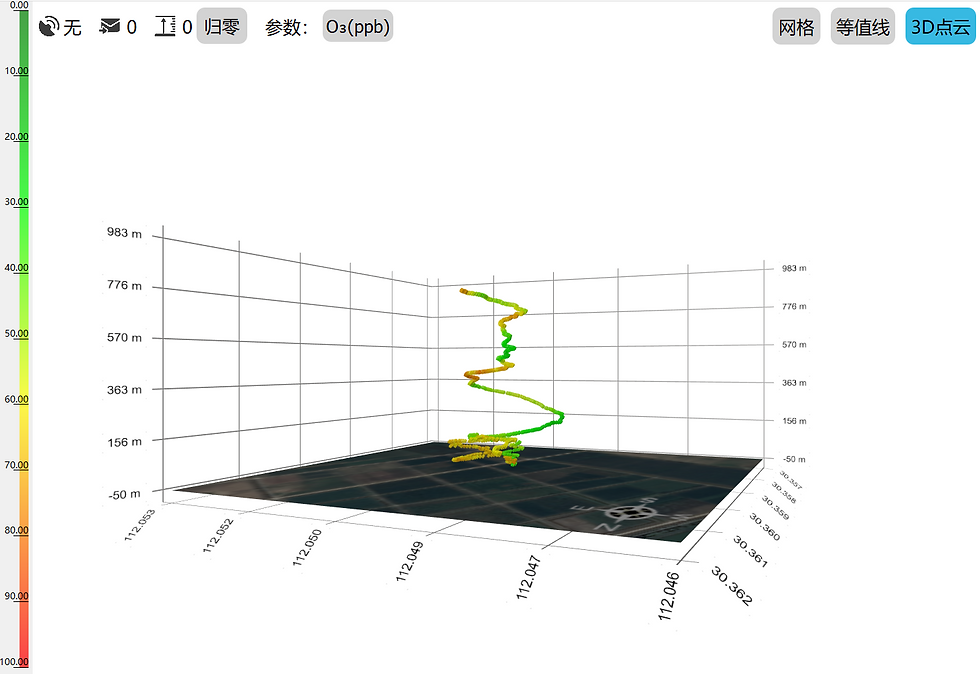
The real-time 3D point cloud heat map for O3 distributions in the tethered airship-mounted experiment
After the sampling mission, the monitoring data would be loaded and saved locally in the software. The researchers could find the “Export” in the taskbar and click “Export Data(CSV)”. The information in the CVS included altitude, latitude and longitude, temperature and humidity, air pressure and the concentrations of various target gases. Through data analysis, Sniffer4D Mapper generated the concentration profiles of the target gases and provided reliable data and analytical results for the experiment.

The CSV mission report generated by Sniffer4D Mapper
The picture below is the screenshot of the analysis report for the data collected in the experiment:
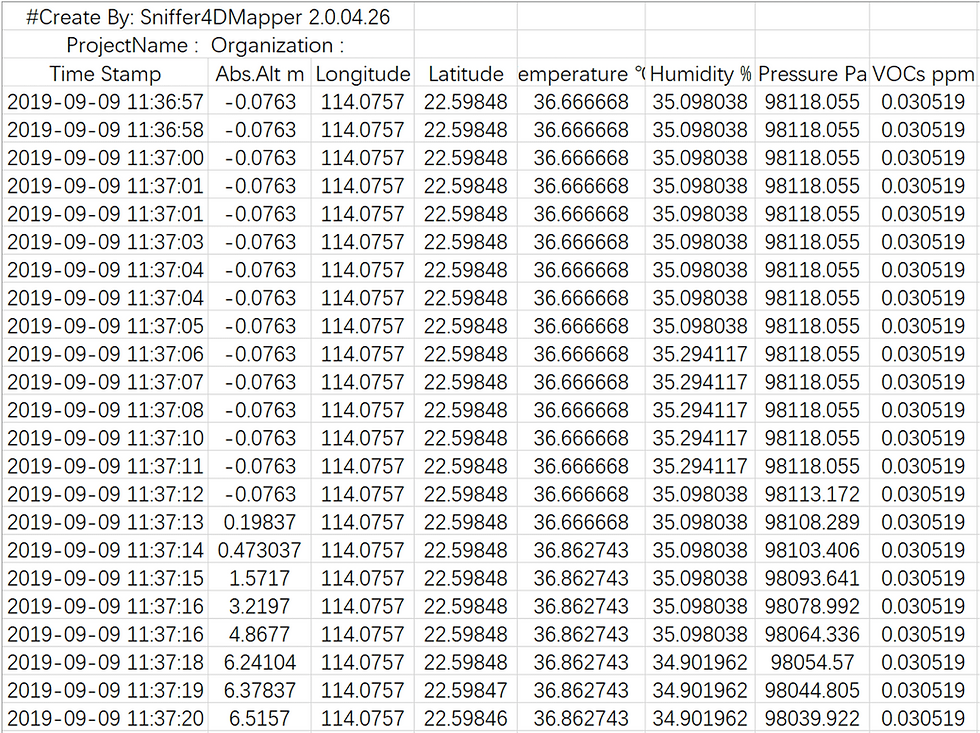
Datasheet (CSV)
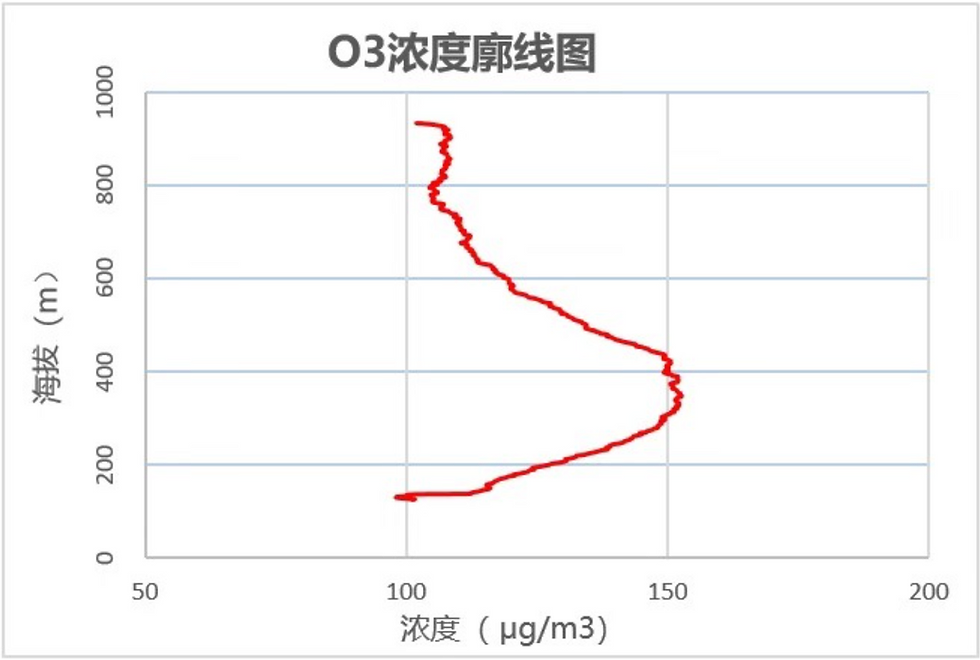
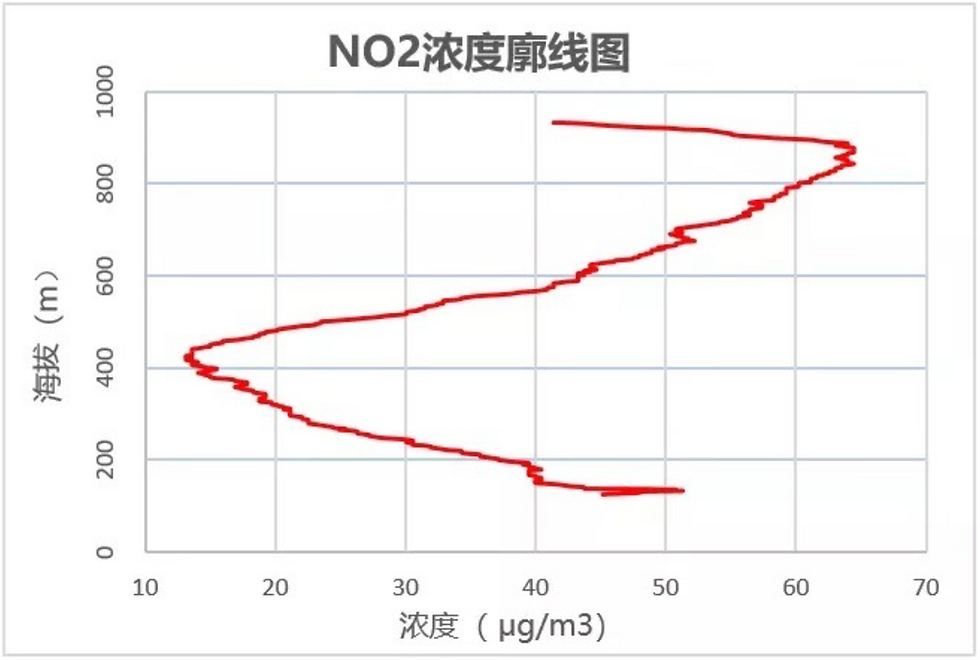
The picture below showed the O3, SO2 and NO2 concentration profiles generated through the analysis of the experiment results:

Pros and Cons of Both Detection Methods

Customer-centered
Sniffer4D has been applied in many industries in different cities from home and abroad. We will keep updating the signal processing algorithm and our embedded & analytical software Sniffer4D Mapper. Besides, we would also provide the function-customized Sniffer4D for the special needs of some research teams to solve their practical problems.


